1. ტექნიკური მახასიათებლებიeVTOL ძრავა
In განაწილებული ელექტროენერგიაძრავები ფრთებზე ან ფიუზელაჟზე რამდენიმე პროპელერის ან ვენტილატორის ამოძრავებას ახდენენ, რათა შექმნან ძრავის სისტემა, რომელიც თვითმფრინავს ბიძგს აძლევს. ძრავის სიმძლავრის სიმკვრივე პირდაპირ გავლენას ახდენს თვითმფრინავის დატვირთვის ტევადობაზე. ძრავის სიმძლავრის გამომუშავების ტევადობა, საიმედოობა და გარემოზე ადაპტირება მნიშვნელოვანი ფაქტორებია ელექტროძრავიანი თვითმფრინავის დინამიური მახასიათებლებისა და უსაფრთხოების დასადგენად. ელექტრომობილების, დრონების და eVTOL ძრავების შერჩევა განსხვავებულია სხვადასხვა ხარჯების, გამოყენების სცენარების და სხვა მიზეზების გამო [1].

(ფოტოს წყარო: Network/Safran-ის ოფიციალური ვებგვერდი)
1) ელექტრომობილები: მეტი მუდმივი მაგნიტისინქრონული ძრავები,მუდმივი მაგნიტის ძრავები, რომლებსაც აქვთ მაღალი ეფექტურობა და ბრუნვის მომენტი, უკეთეს მართვის გამოცდილებას უზრუნველყოფენ. ამავდროულად, მუდმივი მაგნიტის ძრავების მაღალი სიმძლავრის სიმკვრივე ასევე ეხმარება ელექტრომობილებს იმავე მოცულობით უფრო მეტი სიმძლავრის მიღებაში.
(2) უპილოტო საფრენი აპარატი: ხშირად გამოყენებული უჯაგრისომუდმივი დენის ძრავა.უჯაგრისო დენის ძრავას აქვს დაბალი წონა და ხმაური, ხოლო მომსახურების ღირებულება დაბალია, რაც შეესაბამება უპილოტო საფრენი აპარატების ფრენის მოთხოვნებს; მეორეც, უჯაგრისო დენის ძრავის სიჩქარე უფრო მაღალია, რაც შეესაბამება დრონების მაღალსიჩქარიანი ფრენის მოთხოვნებს. მაგალითად, DJI იყენებს უჯაგრისო ძრავებს.
(3) eVTOL: ძრავის ეფექტურობისა და ბრუნვის მომენტის სიმკვრივის მიმართ უფრო მაღალი მოთხოვნები, მუდმივი მაგნიტის მქონე სინქრონული ძრავა ელექტროძრავის ენერგოსისტემისთვის ძალიან პერსპექტიული გადაწყვეტაა, რადგან ღერძული ნაკადის მქონე მუდმივი მაგნიტის მქონე ძრავას აქვს რადიალური სივრცის მაღალი გამოყენების მაჩვენებელი, ხოლო სიმძლავრის სიმკვრივესა და ბრუნვის მომენტის სიმკვრივეს უპირატესობა აქვს მცირე სიგრძისა და დიამეტრის თანაფარდობის შემთხვევაში. თანამედროვე ელექტრო VTOL თვითმფრინავები, როგორიცაა Joby S4 და Archer Midnight, ყველა იყენებს მუდმივი მაგნიტის მქონე სინქრონულ ძრავებს [1].
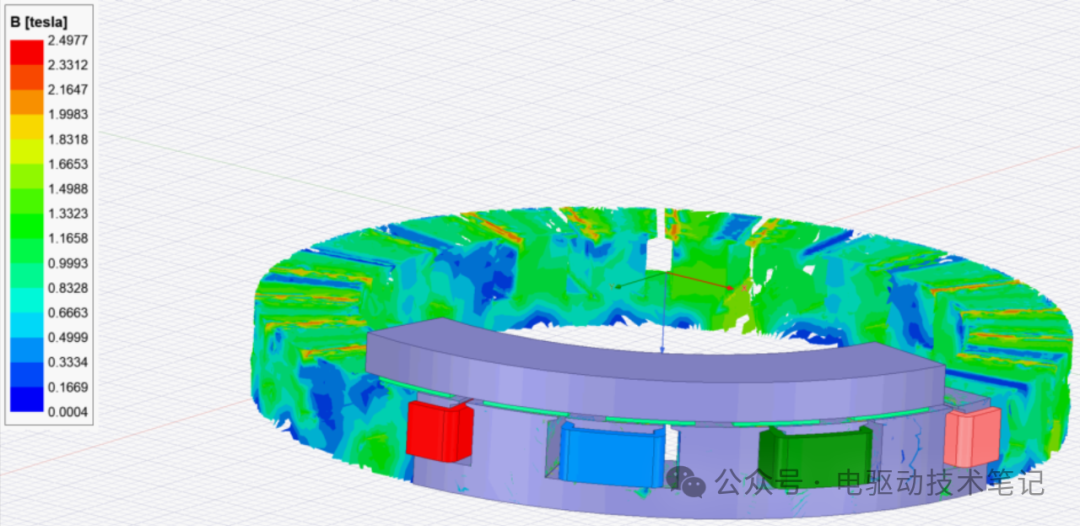
ქვემოთ მოცემულ ფიგურაზე ნაჩვენებია ერთსტატორიანი ერთროტორიანი ღერძული ნაკადის ძრავის ფიქსირებული როტორის მაგნიტური ინდუქციის ინტენსივობის ღრუბლოვანი გამოსახულება.
ქვემოთ მოცემულ ფიგურაში მოცემულია ელექტრო თვითმფრინავისა და ელექტრომობილის ძრავის პარამეტრების შედარება.

2. eVTOL ძრავის განვითარების ტენდენცია
ამჟამად, eVTOL ენერგოსისტემის განვითარების მთავარი ტენდენციაა ძრავის სტრუქტურისა და გაგრილების სისტემის დამხმარე წონის შემცირება ელექტრომაგნიტური დიზაინის ტექნოლოგიის, თერმული მართვის ტექნოლოგიისა და მსუბუქი წონის ტექნოლოგიის გაუმჯობესებით, ასევე ძრავის სიმძლავრის სიმკვრივისა და ცვლადი პირობების ფართო სპექტრის სიმძლავრის გამომუშავების მუდმივი გაუმჯობესებით. „მფრინავი მანქანებისა და ძირითადი ტექნოლოგიების კვლევისა და განვითარების“ თანახმად, საავიაციო ძრავამ შეძლო ძრავის კორპუსის ნომინალური სიმძლავრის სიმკვრივის 5 კვტ/კგ-ზე მეტი გაზრდა მაღალი ტემპერატურის ზღვრული იზოლაციის მასალების, მაღალი მაგნიტური ენერგიის სიმკვრივის მქონე მუდმივი მაგნიტის მასალების და მსუბუქი სტრუქტურული მასალების გამოყენებით. ძრავის ელექტრომაგნიტური სტრუქტურის დიზაინის გაუმჯობესებით, როგორიცაა ჰალბახის მაგნიტური მასივის, რკინის ბირთვის გარეშე სტრუქტურის, ლიცის მავთულის დახვევის და სხვა ტექნოლოგიების გამოყენება, ასევე ძრავის სითბოს გაფრქვევის დიზაინის გაუმჯობესებით, მოსალოდნელია, რომ ძრავის კორპუსის ნომინალური სიმძლავრის სიმკვრივე 2030 წელს 10 კვტ/კგ-ს მიაღწევს, ხოლო ნომინალური სიმძლავრის სიმკვრივე 2035 წელს 13 კვტ/კგ-ს გადააჭარბებს [1].

3. წმინდა ელექტრო და ჰიბრიდული მარშრუტების შედარება
წმინდა ელექტრო და ჰიბრიდულ მარშრუტებთან შედარებით, შესაბამისი მწარმოებლების ამჟამინდელი შერჩევის მიხედვით, შიდა eVTOL პროექტი ძირითადად ეფუძნება წმინდა ელექტრო სქემას, რომელიც შემოიფარგლება ლითიუმ-იონური ბატარეების ენერგიის სიმკვრივით, ხოლო დაბალი მგზავრების ტევადობის eVTOL წმინდა ელექტროძრავის ტექნოლოგიის საუკეთესო დასაფრენი ადგილია. საზღვარგარეთ, ზოგიერთმა მწარმოებელმა წინასწარ შეადგინა ჰიბრიდული გეგმა და აიღო ლიდერობა ტესტირებისა და იტერაციის მრავალ რაუნდში. როგორც ქვემოთ მოცემული ცხრილიდან ჩანს, ჰიბრიდული სქემა აშკარად უფრო ძლიერია გამძლეობის კუთხით და მომავალში შეიძლება მიაღწიოს მეტ გამოყენებას საშუალო-შორი დისტანციისა და დაბალი სიმაღლის მოძრაობის სცენარში [1].
გამოქვეყნების დრო: 2025 წლის 27 თებერვალი